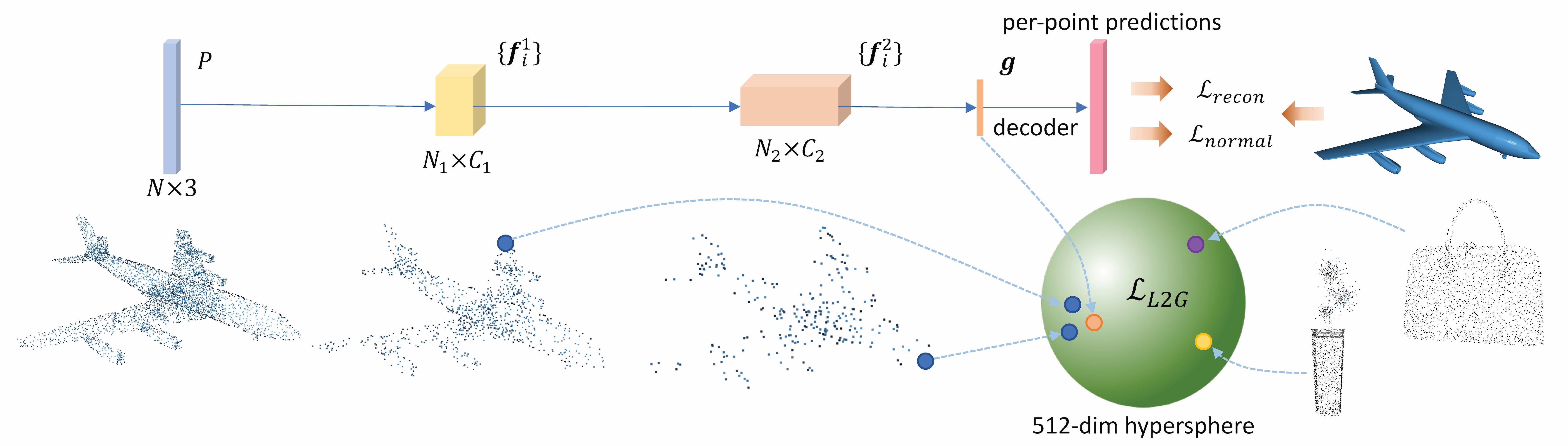
This repository contains the PyTorch implementation for paper Global-Local Bidirectional Reasoning for Unsupervised Representation Learning of 3D Point Clouds (CVPR 2020) [arXiv]
If you find our work useful in your research, please consider citing:
@inproceedings{rao2020global,
title={Global-Local Bidirectional Reasoning for Unsupervised Representation Learning of 3D Point Clouds},
author={Rao, Yongming and Lu, Jiwen and Zhou, Jie},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2020}
}
- Python 3
- Pytorch 0.4
- CMake > 2.8
Note: The code is not not compatible with Pytorch >= 1.0 due to the C++/CUDA extensions.
mkdir build && cd build
cmake .. && make
- Download ModelNet point clouds (XYZ and normal):
mkdir dataset && cd dataset
wget https://shapenet.cs.stanford.edu/media/modelnet40_normal_resampled.zip
unzip modelnet40_normal_resampled.zip
- Preprocess dataset:
CUDA_VISIBLE_DEVICES=0 python tools/prepare_modelnet.py
You can download our prepared ScanNet dataset for object classification from Google Drive and move the uncompressed data folder to dataset/scannet. The data structure should be:
dataset/scannet
├── train_files.txt
├── test_files.txt
├── train_0.h5
...
├── test_0.h5
...
The ScanObjectNN dataset can be found here. You can download the h5_files.zipped and move the uncompressed data folder to dataset/ScanObjectNN. The data sturcture should be:
dataset/ScanObjectNN
├── main_split
| └── training_objectdataset.h5
| ...
├── main_split_nobg
| └── training_objectdataset.h5
| ...
...
To train an SSG PointNet++ model on ModelNet:
bash train.sh exp_name pointnet2 modelnet
To train an SSG RSCNN model on ModelNet:
bash train.sh exp_name pointnet2 modelnet
You can modify multiplier in cfgs/config.yaml to train larger models. As a reference, the unsupervisedly trained 1x SSG PointNet++ and 1x SSG RSCNN models should have around 92.2% accuracy on ModelNet40. By increasing channel width (4x~5x), our best PointNet++ and RSCNN models achieved around 93.0% accuracy. The results might vary by 0.2%~0.5% between identical runs due to different random seed.
To obtain the results on ScanNet:
bash train.sh exp_name pointnet2 scannet
To obtain the results on ScanObjectNN:
bash train.sh exp_name pointnet2 scanobjectnn
Note that for experiments on ScanNet and ScanObjectNN, the feature extraction network is still trained on ModelNet. We only train the Linear SVM classifier on the corresponding dataset to obtain the classification results.
The code is based on Relation-Shape CNN and Pointnet2_PyTorch.
If you have any questions about our work, please contact raoyongming95@gmail.com